레이더(RADAR)
차량 전방용 레이더 (사진출처: HL Klemove)

레이더는 Radio Detection And Ranging의 줄임말로 전자파를 발사하고 반사되어 돌아오는 신호를 기반으로 주변 사물과의 거리, 속도, 방향 등의 정보를 추출하는 센서입니다. 또 날씨와 시간에 상관없이 제 성능을 발휘해 자율주행 센서 중 신뢰도가 가장 높습니다.레이더의 작동 원리는 다음과 같습니다.트랜스미터에서 방사상으로 송출하는 라디오 전파가 물체에 반사되어 리시버로 수신됩니다.송수신 시 시간 및 주파수 차이를 통해 거리, 속도, 그리고 각도 등 다양한 정보를 알 수 있습니다.
인기글
")



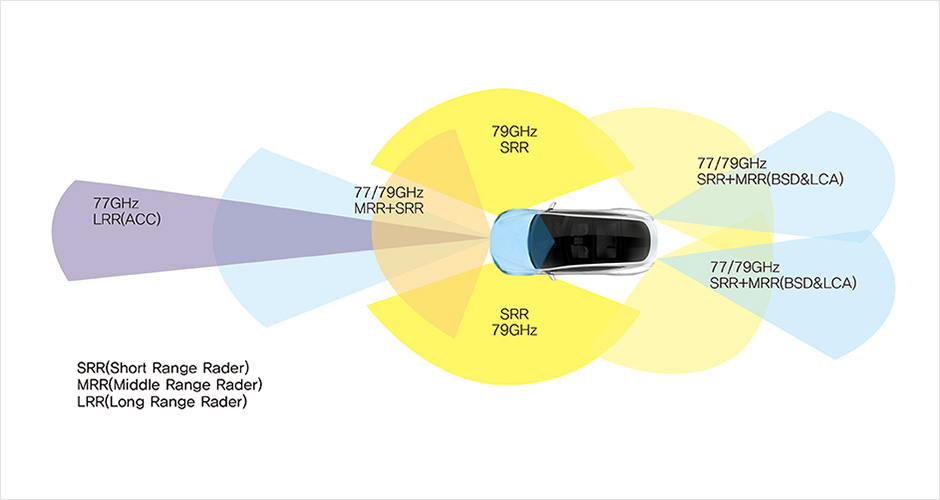
레이더 센서는 77GHz대역과(장거리)79GHz대역(단거리)의 2개의 대역을 사용할 수 있도록 국제 규격이 마련되었으며 이로 인한 장거리 또는 단거리 레이더로 구분할 수 있습니다.주파수는 파장이 길수록(저주파일수록) 같은 출력으로 전파를 발사해도 도달할 수 있는 거리가 길어지지만 상대적으로 정도가 떨어지게 됩니다.이런 성질 때문에 장거리 레이더 센서에는 비교적 저 주파의 77GHz대역을 사용합니다.보다 명확한 정보가 필요한 단거리 레이더 센서에는 대역 폭이 넓은 79GHz대역을 사용합니다.장거리 레이더는 150~200m이상을 확인하는 것, 화각이 40도 안팎과 작은 단거리 레이더는 100m이내의 거리를 감지하되, 화각이 100도 이상으로 됩니다.이를 받고 장거리 레이더 센서는 앞 차와의 거리와 속도를 측정하는 충돌을 피할 전방 충돌 방지 지원(FCA)기술에 주로 활용되어 단거리 레이더 센서는 뒤쪽의 사각 지대의 차량을 확인하는 블라인드 스폿 감지(BSD)기술에 주로 활용된다.라이더(LiDAR)

회전 타입 라이다 (사진출처 : 벨로다인)
고정형 라이다 (사진 출처 : 발레오)

라이더는 Light Detection And Ranging의 약어입니다.라이더 센서는, 이미터에서 레이저, 즉 빛을 보낸 뒤 물체에서 반사하고 리시버에 돌아가는 빛 에너지를 분석하고 차량 주변의 3차원 정보를 인식하는 센서입니다.ToF(Time of Flight), 즉 전파를 송수신하고 시간, 거리 등을 파악하는 레이더와 비슷한 원리입니다.라이더 센서는 사물의 모양과 각도를 정밀 측정할 수 있다는 장점이 있습니다.또 빛의 속도라는 말이 불리는 만큼 라이더 센서에서 보낸 레이저는 속도가 빠르고 거리가 깁니다.그러나 비나 눈 등 기상 악화 시 성능이 떨어지고 가격이 높다는 단점이 있습니다.자동 운전 차에서는 라이더 센서를 카메라와 레이더와 함께 사용하고 정확하고 안전한 주행 환경을 인식하고 판단할 수 있습니다.이렇게 2개 이상의 센서를 조합하고 자동 운전 센싱 기능의 신뢰성을 높이는 방법을 센서 퓨전이라고 합니다.구글 웨이 모, 애플 프로젝트 타이탄 등 자동 운전 기술을 선도하는 기업은 라이더 센서를 탑재하고 자동 운전을 실험하고 있지만 테슬라의 이 론 마스크는 비싼 라이더를 사용하지 않기로 유명합니다.(테슬러는 실제로 카메라와 레이더만이 수준 높은 자동 운전 기능을 실현하는)레이더와 라이더 센서의 차이 비교 요약( 빨간 색으로 표시한 부분이 장점)

구분 레이더 라이더 인식 방법 전파 레이저 인식차 위안2D 3D point cloud 해상도와 정확도가 낮음 가격이 싸다 높은 전력 소모, 낮은, 높은, 비, 눈, 안개의 영향이 크다

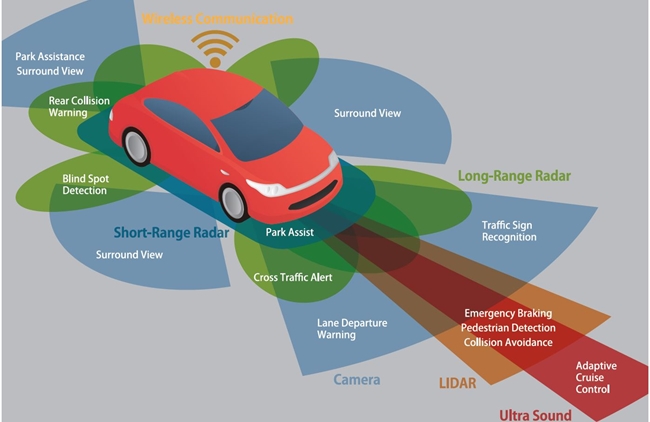
이처럼 각 센서의 장단점이 다른 하나의 센서로는 그 센서만 단점을 커버할 수 없어 레이더, 라이더, 카메라 센서의 조합으로 센서 퓨전을 하고 탐사의 신뢰도를 높이게 됩니다.출처:자동 운전 센서 퓨전(라이더, 레이더, 카메라 장점 단점):네이버 블로그(naver.com), 라이더, 레이더(레이더)의 차이, 장점, 단점, 가격 비교(tistory.com), 자동 운전 차의 3개의 눈의 카메라·레이더·라이더 센서:네이버 포스트(naver.com)[ 그렇구나!]!생기 과학]레이더, 자동 운전 차”눈”으로 각광(hankookilbo.com), 자동 운전 라이더(LiDAR)센서 원리:네이버 블로그(naver.com)센서로 시작되는 센서로 끝난 세계 ③(elec4.co.kr)
